Grasp stability prediction for a dexterous robotic hand combining depth vision and haptic bayesian exploration
Abstract
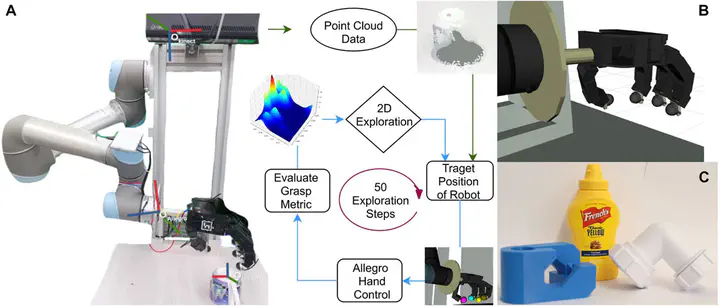
Grasp stability prediction of unknown objects is crucial to enable autonomous robotic manipulation in an unstructured environment. Even if prior information about the object is available, real-time local exploration might be necessary to mitigate object modelling inaccuracies. This paper presents an approach to predict safe grasps of unknown objects using depth vision and a dexterous robot hand equipped with tactile feedback. Our approach does not assume any prior knowledge about the objects. First, an object pose estimation is obtained from RGB-D sensing; then, the object is explored haptically to maximise a given grasp metric. We compare two probabilistic methods (i.e. standard and unscented Bayesian Optimisation) against random exploration (i.e. uniform grid search). Our experimental results demonstrate that these probabilistic methods can provide confident predictions after a limited number of exploratory observations, and that unscented Bayesian Optimisation can find safer grasps, taking into account the uncertainty in robot sensing and grasp execution.