Teleoperation of dexterous robotic hands using Leap Motion and vibrotactile feedback.
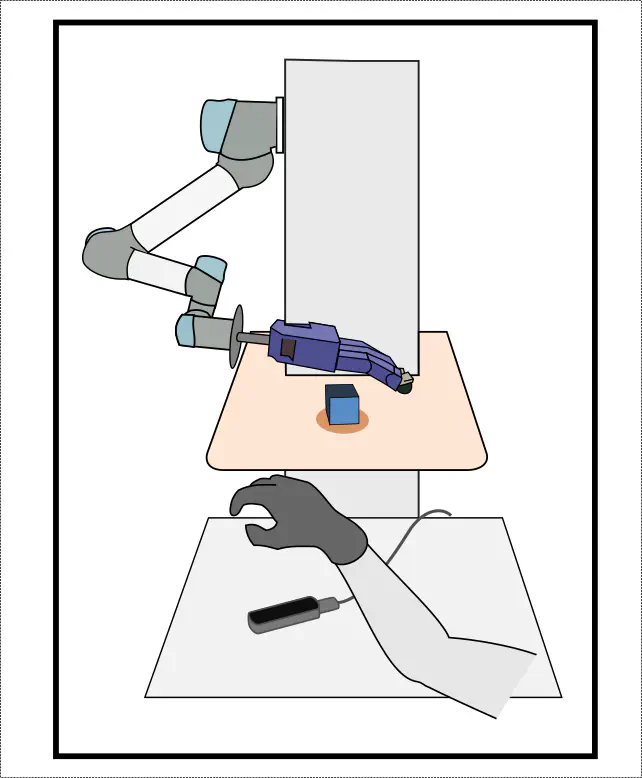
Teleoperation system for a dexterous manipulator composed of an UR5 arm and an Allegro Robot hand. The teleoperation system uses the movement of the tracked hand in combination of the keyboard to generate the robot arm and finger movements. The tactile sensors on the fingertips generates the data used to activate the vibrator on the haptic glove. The latter is used as haptic feedback to the user for a more reactive and accurate teleoperations.
Claudio Coppola
Robotics And Machine Learning Scientist
Machine learning and robotics expert with experience in industry and academia applying AI and data science to transportation forecasting, manufacturing automation, robotic perception, and human-robot interaction.